PID Controller in Control Systems
What is a PID Controller?
The term PID stands for proportional integral derivative and it is one kind of device used to control different process variables like pressure, flow, temperature, and speed in industrial applications. In this controller, a control loop feedback device is used to regulate all the process variables.
This type of control is used to drive a system in the direction of an objective location otherwise level. It is almost everywhere for temperature control and used in scientific processes, automation & myriad chemical. In this controller, closed-loop feedback is used to maintain the real output from a method like close to the objective otherwise output at the fixe point if possible.
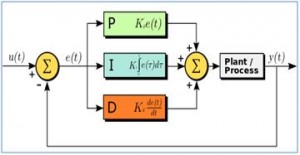
PID Controller Block Diagram
A closed-loop system like a PID controller includes a feedback control system. This system evaluates the feedback variable using a fixed point to generate an error signal. Based on that, it alters the system output. This procedure will continue till the error reaches Zero otherwise the value of the feedback variable becomes equivalent to a fixed point.
This controller provides good results as compared with the ON/OFF type controller. In the ON/OFF type controller, simply two conditions are obtainable to manage the system. Once the process value is lower than the fixed point, then it will turn ON. Similarly, it will turn OFF once the value is higher than a fixed value. The output is not stable in this kind of controller and it will swing frequently in the region of the fixed point. However, this controller is more steady & accurate as compared to the ON/OFF type controller.
PID Control in Control Systems
PID controllers are considered to be the best controller in the control system family. Nicholas Minorsky published the theoretical analysis paper on PID controller. For PID control the actuating signal consists of proportional error signal added with derivative and integral of the error signal. Therefore, the actuating signal for PID control is:

The Laplace transform of the actuating signal incorporating PID control is

There are some control actions which can be achieved by using any of the two parameters of the PID controller. Two parameters can work while keeping the third one to zero. So PID controller becomes sometimes PI (proportion-integral), PD (proportional-derivative) or even P or I. The derivative term D is responsible for noise measurement while the integral term is meant for reaching the targeted value of the system. In early days PID controller was used as a mechanical device. These were pneumatic controllers as they were compressed by air. Mechanical controllers include spring, lever or mass. Many complex electronic systems are provided with a PID control loop. In modern days PID controllers are used in PLC (programmable logic controllers) in the industry. The proportional, derivative and integral parameters can be expressed as – Kp, Kd and Ki. All these three parameters have an effect on the closed loop control system. It affects rise time, settling time and overshoot and also the steady state error.
| Control Response | Rise time | Settling time | Overshoot | Steady state error |
| Kp | decrease | small change | increase | decrease |
| Kd | small change | decrease | decrease | no change |
| Ki | decrease | increase | increase | eliminate |
PID control combines the advantages of proportional, derivative and integral control actions. Let us discuss these control actions in brief.
Proportional Control: Here actuating signal for the control action in a control system is proportional to the error signal. The error signal being the difference between the reference input signal and the feedback signal obtained from input.
Derivative Control: The actuating signal consists of proportional error signal added with derivative of the error signal. Therefore, the actuating signal for derivative control action is given by,

Integral Control: For integral control action the actuating signal consists of proportional error signal added with integral of the error signal. Therefore, the actuating signal for integral control action is given by

A PID controller has some limitations also apart from being one of the best controllers in control action system. PID control is applicable to many control actions but it does not perform well in case of optimal control. Main disadvantage is the feedback path. PID is not provided with any model of the process. Other drawbacks are that PID is linear system and derivative part is noise sensitive. Small amount of noise can cause great change in the output.
References

Comments
Post a Comment